
![]() ,
,
где ![]() .
.
Отсюда видно,что статическая погрешность данной САР вдвое меньше погрешности САР по отклонению напряжения на двигателе. Недостатком является то, что данная САР работает только при последовательном соединении двух двигателей. Однако на практике это наиболее распространённый случай соединения двигателей.
Функциональная САР
САР, приведённая на рис. 7.6 также обеспечивает постоянство мощности каждого из двух последовательно включёных двигателей. Поскольку ток генератора и тягового двигателя один и тот же, то постоянство мощности двигателя можно обеспечить поддержанием напряжения на двигателе, равным доле напряжения генератора.
Поскольку при исходном условии прикладываемое к двигателю напряжение U0=const и справедливо соотношение
U0=Eм1+I0R0=ce1кф1iв1ω10+I0R0,
то выражение для определения тока возбуждения iв1 тягового двигателя имеет вид
![]() ,
,
где R0 – сопротивление якорной цепи ТЭД.
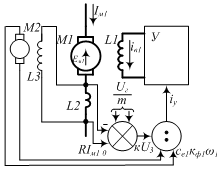
Для обеспечения постоянства напряжения на ТЭД (при линейной характеристике намагничивания) ток возбуждения iв1 должен изменяться обратно пропорционально частоте вращения якоря. Поскольку ток и напряжение генератора связаны между собой (внешней характеристикой генератора), а с изменением нагрузочного момента на двигателе будет изменяться его ток (т.е. ток генератора), то вместо напряжения на двигателе в последнем выражении можно ввести долю напряжения генератора, которая и будет выступать в качестве задающего. Тогда
![]() ,
,
где Uз=Uг /m , m – количество последовательно включённых ТЭД в цепи.
Уравнение делительного устройства в приращениях имеет вид
![]() ,
,
где ry – сопротивление цепи управления; Δiy – приращение тока управления, к – коэффициент.
Уравнение усилителя
![]() .
.
Совместное решение уравнений приводить к получению выражения, совпадающего с (7.3), в котором коэффициенты имеют следующий вид
![]() .
.
В статике (при р=0) зависимость ΔЕс=f(ΔМС) имеет вид
![]() , где
, где ![]() .
.
Выбирая rв>ккуry либо rв<ккуry можно обеспечить необходимую точность управления с положительной, либо отрицательной ошибкой.
Комбинированная САР по отклонению напряжения и частоты
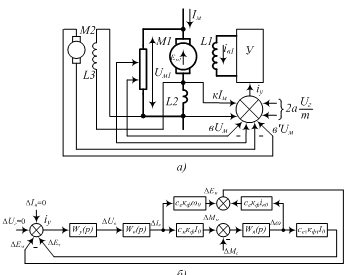
На рис. 7.7а приведе напринципиальная схема САР, а на рис. 7.7б структурная схема её линейной модели. Эта схема имеет два контура управления: по напряжению на двигателе Uм1 и по сигналу Ет, пропорциональному частоте вращения вала якоря ТЭД.
Суммарный управляющий сигнал
![]() .
.
Уравнение (7.1) сохраняется и в данном случае. После преобразвания структурной схемы и проведения алгебраических преобразований получаем выражение для определения зависимости ΔЕм(р)=f(ΔMC), аналогичное (7.3)
![]() ,
,
где ![]()
![]() ;
; ![]() ,
,
а остальные коэффициенты идентичны коэффициентам формулы (7.3).
В статическом режиме (при р=0) выражение принимает вид
![]() . (7.7)
. (7.7)
Обеспечить условие инвариантности САР в динамике без усложнения схемы невозможно.
В статике условие выполняется при Uв0-куЕт0=0, чему соответствует начальная частота вращения вала якоря ТЭД
![]() , где α=Iм0 /iв0.
, где α=Iм0 /iв0.
Следовательно, данная САР инвариантна в статическом режиме только при одном значении ω0. которое целесообразно выбирать для наиболее тяжёлого режима работы. В окрестностях этого режима можно добиться существенного уменьшения погрешности САР путём увеличения значения знаменателя в выражении (7.7).
Таким образом, данная САР сочетает положительные свойства исходных схем и может обеспечить более высокую точность работы.
САР для выравнивания токов в параллельных цепях
Рассмотренные САР пригодны при последовательном соединении ТЭД. Однако на практике применяются схемы последовательно-параллельного их соединения с источником питания. В этом случае выравнивание мощностей параллельных цепей целесообразно осуществлять регулированием (выравниванием) токов в этих цепях и напряжений на двигателях. В качестве примера решения этой задачи рассмотрим схему, приведённую на рис. 7.8.