
На рисунке 6 показана зависимость изменения смещении в кинематической цепи РП от усилия в нём, пересчитанная с учётом масштабных коэффициентов и тарировочной характеристики в декартову систему координат с непосредственной графической зависимости, полученной автомобиля, эксплуатационное состояние которого соответствовало нормативным требованиям (пробег 2тыс.км), на который были установлены крайние рулевые шарниры с зазорами 0,170-0,175 мм.
Из рисунка 6 следует возможность раздельного определения зазоров и деформаций в подвижных спряжениях РП. Так, люфту соответствует наибольшее и скачкообразное смещение на единицу создаваемого усилия, что характеризуется углом наклона зависимости -![]() при усилии 16-18 даН.
при усилии 16-18 даН.
Упругая деформация элементов подвижных сопряжении (не деталей, для деформации которых необходимо гораздо большее усилие) характеризуется плавным и стабильным смещением на единицу силы и меньшим углом - ![]() . Преодоление вязкого трения характеризуется наименьшим углом -
. Преодоление вязкого трения характеризуется наименьшим углом -![]() (рис.6).
(рис.6).
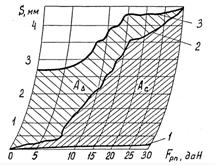
Рис.5. Графическая зависимость изменения критерия качества РП, полученная экспериментально: I - тарировочная характеристика устройства, 2 и 3 - зависимости на прямом и обратном ходе
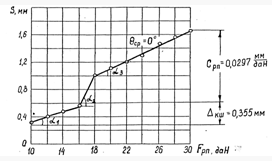
Рис. 6. Зависимость изменения критерия качества РП, пересчитанная в декартову систему координат для модели "Москвич – 2140"
Кинематика рулевого привода оценивается в условиях силового нагружения по соотношению углов поворота управляемых колёс при установке их в заданное угловое положение в обе стороны на один и тот же угол путём сравнения приращения расстояний между ними с расстоянием между дисками управляемых колёс в положении прямолинейного движения.
Поворот управляемых колёс осуществляется как рулевым колесом, так и приложением усилий к управляемым колёсам, причём в определённых режимах испытания это позволит увеличить объём информации, т.к. подвижные сопряжения реагируют на усилие поочерёдно, в соответствии с коэффициентами приведения смещений к радиусу диска колеса [4]. При правильной кинематике РП гистограмма (рис.7) будет симметричной.
Характер износа, т.е. геометрию износа подвижных сопряжений можно оценить по величине приращения расстояния между 'дисками (а не по абсолютной величине расстояния) после создания усилия между ними также при установке колёс в ряд угловых положений. Так, из диаграммы (рис.8) следует неравномерность износа подвижных сопряжении и эксплуатация автомобиля с уводом вправо от заданной траектории движения.
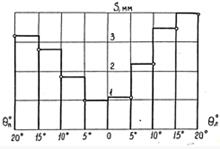
Рис.7. Гистограмма абсолютных величин смещений в кинематической цепи рулевого привода, полученных при установке управляемых колёс в ряд фиксированных положений в обе стороны
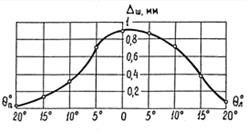
Рис. 8. Диаграмма величин зазоров (люфт) в шарнирных сопряжениях рулевой трапеции, полученная при установке управляемых колёс в ряд фиксированных положений в обе стороны